
Today, I learned how create a separate css file for my web page. We created a new file and titled it "myStyle.css" and moved over all the style information. Then, I learned how to keep the style by linking the css file in the html files. I also learned how to "push" my GitHub to keep information updated.
I made so many changes to my website today! I learned how to add gifs to my website and how it's just like adding pictures. I also opened up a JavaScript file today and learned to place everything under script within that section. I had some trouble at first but managed to add 3 functions to my about page.
Caesar's cipher involved using functions, branching, and variables. We created our file in Python. we had our string which was our original message and we added our shift amount which was the number of places we wanted our letters to change from the alphabet or in this case our asciiValue. We had to create a variable for our character and set it equal to our cypherString so we could print our cipher
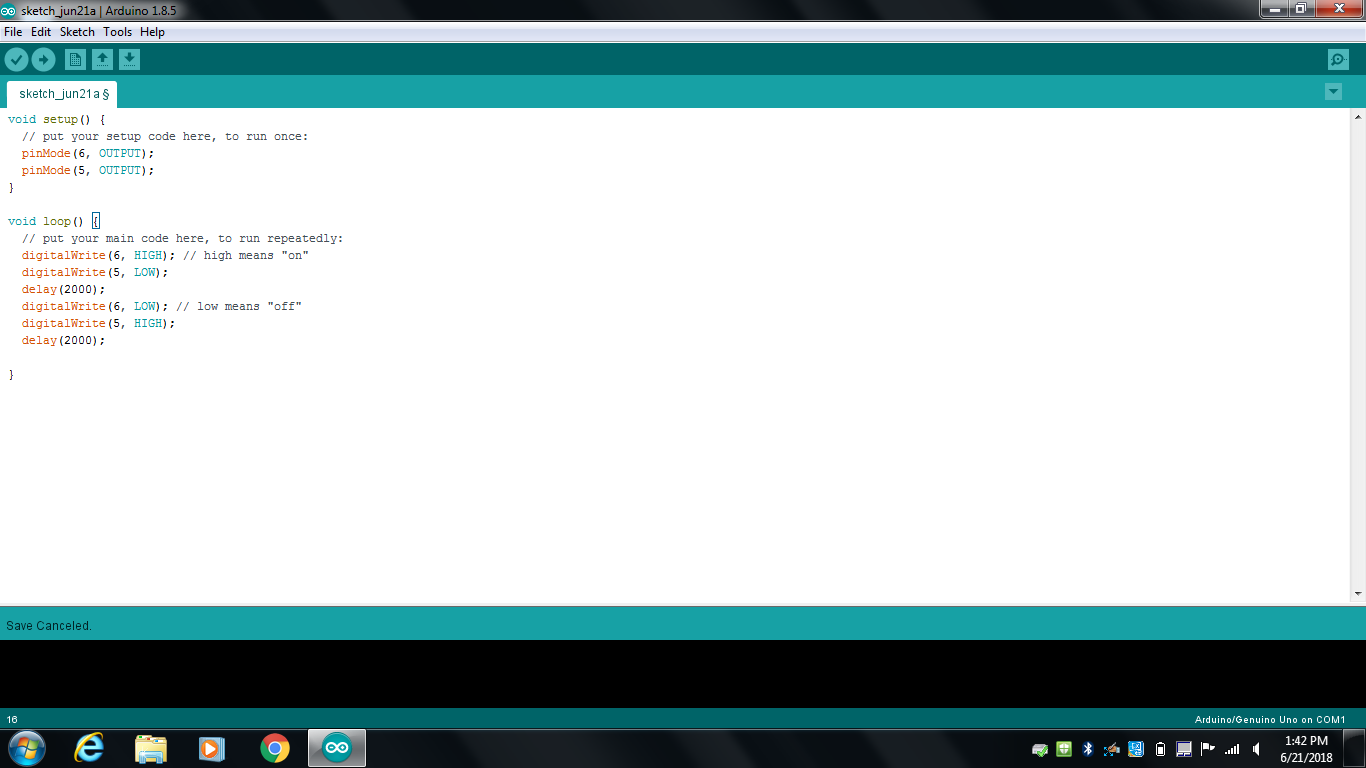
Today we worked on building a circuit on our breadboard and learned to make the lights turn on. Then we used Arduino to upload a code to our breadboard. We also decided to connect two of our boards together so they could both light up. We experimented with the speed of the flash of the lights and we made also made the lights on each breadboard blink at different speeds. We did this by changing the number in the code with the "delay(#)" either below the digitalWrite low or high statement.